Using Nanaimo¶
To illustrate how to use Nanaimo we are going to work with a specific scenario. We’ll be writing tests to verify an IMU using a pan-tilt test rig.
Fig. 1 Example scenario using Nanaimo to test an IMU.
Our test will run the following steps:
- Upload the firmware using a serial bootloader.
- Start the pan/tilt test rig,
- Start capturing IMU readings.
- Stop the pan/tilt test rig.
- Validate the data.
As you read this document you might wonder if the amount of rigor is necessary given the sometimes trivial nature of tests for components and sub-systems. One might be tempted to write a bash script or a simpler python script with no formal structure.
Don’t normalize deviance….
The authors of Nanaimo aver that the real-world is complicated and messy. When you include physical devices in software workflows you mix something that is inherently chaotic with something that assumes everything it does is absolutely deterministic. Dealing with edge cases and ensuring repeatability turns unstructured code into a complex mess. With unmanaged complexity comes unexpected behavior and when the unexpected behavior is tolerated a normalization of deviance sets in making the tests worse than nothing.
Nanaimo seeks to organize complexity within Fixtures presenting
a simplified API to test cases and allowing for a verification syntax that is concise and readable.
Furthermore, the architecture enables and encourages fixture reuse supporting
DRY principles.
To summarize; as you read this guide keep the following goals in mind:
Encapsulate complexity in Fixtures. Write simple and clear test cases. Don’t ignore failures.
Taxonomy¶
Let’s take a moment to review some important concepts and terms we’ll use in our demonstration below. There are two main things you will build using Nanaimo:
- test cases
- fixtures
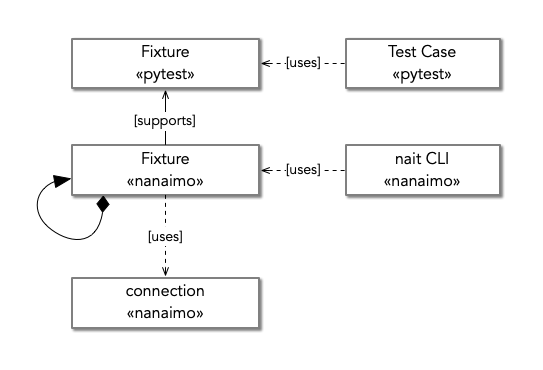
Fig. 2 The major concepts in Nanaimo.
We’ll review both of these in the next two sections and will cover nait (NanAimo Interactive Terminal) later in this document.
Test Fixtures¶

Fig. 3 A test fixture used to hold material under test in a UTM [1].
Mechanical, material, and electrical engineers may be confused by the term “fixture” as used by software engineers. The former group uses the term to describe a physical adapter holding test material in a precise and repeatable position within a test instrument. For software engineers the term is similar but purely logical. For example, JUnit describes a fixture as something that ensures “there is a well known and fixed environment in which tests are run so that results are repeatable [2].” The term “environment” is the key here. Tests must be run in a well-known and repeatable environment to be valid. The job of Nanaimo fixtures are to validate and adapt the software testing environment to promote consistency and reliability.
Note
A quick note on “instruments” which is another taxonomic term found in Nanaimo. A Nanaimo
instrument is simply a flavor of Fixture that either manipulates or measures a test subject.
Like the UTM in figure 3,
instruments sometimes need other fixtures which is why Nanaimo
Fixtures are composable.
Test Cases¶
A test case is the xunit [3] term for a single pytest test. For example:
import pytest
from nanaimo import assert_success
@pytest.mark.asyncio
async def test_eating_dessert(nanaimo_bar):
"""
Get a Nanaimo bar and eat it!
"""
assert_success(await nanaimo_bar.gather()).eat()
In this example the “test case” is the test_eating_dessert method. Note the use of
nanaimo_bar.
This is a Nanaimo Fixture acting as a
Pytest fixture. If you are unfamiliar with Pytest
fixtures you should review their documentation at this point.
Nanaimo defines HIL (Hardware-In-the-Loop) test cases as pytests that use
Fixtures to modify, manipulate, and observe hardware available in the test
environment. Figure 4 shows the typical structure of this type of test case.
We’ll discuss each phase in this section of the document and then provide a full example in a following section.

Fig. 4 Typical phases of a HIL unit test.
Phase 1. State Verification¶
The first thing most HIL tests will do is to verify the state of the
required fixtures. Be careful with this phase and remember the
opening admonition, “Encapsulate complexity in fixtures. Write simple test cases. Don’t ignore
failures”. Well designed fixtures should provide internal consistency checks and fail when the
fixture is improperly used rather than requiring each test case to perform fixture setup. Still, not
all required state is generic so there are sometimes checks like, “Is this fixture already powered
up? If so reboot it.” or “Is this instrument calibrated? If not then run the calibration procedure.”
As both examples provided suggest, this phase is often an optimization used to skip lengthy steps
that may be unnecessary. Where initialization steps can take several minutes or more it becomes a
necessary optimization to enable a large number of small and simple tests to be written without
creating test suites that take hours to complete.
Note
Software unittest best practices generally posit that each test should be as narrow as possible
ideally testing everything in the most independent and granular manner possible. Nanaimo seeks
to enable this methodology when using hardware test apparatuses by allowing for highly intelligent
Fixtures to optimize the test rig turn around time and to
ensure all tests can begin in a known state. For those of you interested in writing more
“sociable” tests keep an eye on Issue 74
which would enable this pattern.
Phases 2, 3, & 4. Start/Acquire/Stop¶
The next three steps are sometimes carefully sequenced and sometimes run concurrently. The logic here should be obvious: first you start the flow of data, you sample this data, and then you stop the flow of data. Subtleties do arise especially when you need to capture data that is only available as part of the startup sequence of a device (e.g. when you first power it on). When this data is required you typically modify the sequence to be:
start acquisition > start the fixture > stop the fixture > stop acquisition
You should prefer the form show in in Figure 4 since startup and shutdown are typically special cases.
Phase 5. Analyse¶
Now we get to the pure software part of the test. Nanaimo considers it good form to defer analysing the data until after all fixtures have completed. This makes for two classes of failure:
- Data acquisition failure
- System performance failure
Data acquisition failures should always be treated as unknown failures which are bugs in the test cases and/or test fixtures themselves. Well designed tests should be deterministic and you should always expect to acquire the data you need to analyse a system under test. If you really want to argue the point you can simply reclassify induced hardware failures as the data itself to understand our argument. For example:
# Acquire data
assert_success(await my_fixture.gather(cmd='ping'))
assert_success(await my_fixture.gather(cmd='halt'))
with pytest.raises(DeviceUnavailableError):
await my_fixture.gather(cmd='ping')
…where the “data” is “did the device become unreachable?” which is automatically analysed by
pytest.raises().
It’s more typical, however, to acquire a data-set like logs or sensor data that is then processed comparing it to the required performance of the system under test. Failed assertions here are bugs or regressions in the system itself. It is just this scenario that our example project will explore so let’s get started.
Setting up your Project¶
We won’t go into detail on how to setup a Python project but we’ll add a few things to make pytest happy by default (none of this setup is specific to Nanaimo). Start by creating the following directories and files:
+ myproject
|
| + test
| | test_stuff.py
| | conftest.py
|
| tox.ini
In tox.ini add the following:
[pytest]
log_cli = true
log_cli_level = DEBUG
log_format = %(asctime)s %(levelname)s %(name)s: %(message)s
log_date_format = %Y-%m-%d %H:%M:%S
This will make any use of logging.Logger log to the console when running tests.
Next setup a virtual environment. Again, this isn’t a requirement for Nanaimo but it is a best practice especially when playing around with a package like we’re doing here:
cd myproject
virtualenv .pyenv
source .pyenv/bin/activate
Finally, add Nanaimo:
pip install nanaimo
If you want to run Nanaimo from source you can also do:
pip install -e /path/to/nanaimo/
You may also want to use instruments that have other dependencies on the test environment but we’ll
discuss this more in the section on writing your own Nanaimo Fixture.
Finally, let’s add the “hello world” of Nanaimo, the nanaimo-bar fixture test, to test_stuff.py.
See the nanaimo-bar example above for this example. You should be able to run this test now:
pytest
If you configured the tox pytest section for logging you’ll see this output:
------------------- live log sessionstart -------------------
collected 1 item
test/test_foo.py::test_eating_dessert
----------------------- live log setup -----------------------
2019-11-18 10:28:58 DEBUG asyncio: Using selector: KqueueSelector
2019-11-18 10:28:58 DEBUG asyncio: Using selector: KqueueSelector
----------------------- live log call ------------------------
2019-11-18 10:28:58 INFO nanaimo_bar: don't forget to eat your dessert.
2019-11-18 10:28:58 INFO nanaimo_bar: Nanaimo bars are yummy.
PASSED
Now list your available pytest fixtures:
pytest --fixtures
You’ll see sections with titles like fixtures defined from nanaimo.... For example:
----------------------- fixtures defined from nanaimo.pytest.plugin ------------------------
nanaimo_fixture_manager
Provides a default :class:`FixtureManager <nanaimo.fixtures.FixtureManager>` to a test.
.. invisible-code-block: python
import nanaimo
import nanaimo.fixtures
.. code-block:: python
def test_example(nanaimo_fixture_manager: nanaimo.Namespace) -> None:
common_loop = nanaimo_fixture_manager.loop
:param pytest_request: The request object passed into the pytest fixture factory.
:type pytest_request: _pytest.fixtures.FixtureRequest
:return: A new fixture manager.
:rtype: nanaimo.fixtures.FixtureManager
If you do pytest --help you’ll see the arguments listed for your Nanaimo fixtures. For example
nanaimo_instr_bk_precision:
--bk-port=BK_PORT The port the BK Precision power supply is connected to. Set
NANAIMO_BK_PORT in the environment to override default.
--bk-command=BK_COMMAND, --BC=BK_COMMAND
command
--bk-command-timeout=BK_COMMAND_TIMEOUT
time out for individual commands. Set NANAIMO_BK_COMMAND_TIMEOUT in the
environment to override default.
--bk-target-voltage=BK_TARGET_VOLTAGE
The target voltage Set NANAIMO_BK_TARGET_VOLTAGE in the environment to
override default.
--bk-target-voltage-threshold-rising=BK_TARGET_VOLTAGE_THRESHOLD_RISING
Voltage offset from the target voltage to trigger on when the voltage is
rising. Set NANAIMO_BK_TARGET_VOLTAGE_THRESHOLD_RISING in the
environment to override default.
--bk-target-voltage-threshold-falling=BK_TARGET_VOLTAGE_THRESHOLD_FALLING
Voltage offset from the target voltage to trigger on when the voltage is
falling. Set NANAIMO_BK_TARGET_VOLTAGE_THRESHOLD_FALLING in the
environment to override default.
These are defined by the Nanaimo fixture itself in the
on_visit_test_arguments hook and can be
overridden using explicit commandline parameters to pytest or by passing in overrides in your pytests to
the Fixture.gather() method. The base configuration should come
from defaults either in etc/nanaimo.cfg or in a config file specified by --rcfile.
We’ll cover configuration in a later section. For now we’ll pretend we configured everything already so we can jump into the code and work back to the configuration.
Writing Pytests with Hardware-In-the-Loop¶
Let’s get started with the simplest test to analyse but, perhaps, the most complex to automate; The firmware update.
Firmware Update Pt.1¶
from nanaimo import assert_success
@pytest.mark.asyncio
async def test_upload_firmware(nanaimo_arguments, nanaimo_cmd):
"""
This test requires that a (fictitious) utility 'upload_firmware' is available in
the environment and that it takes the arguments 'firmware path' and 'serial port'
as its arguments.
"""
upload_command = 'upload_firmware {imu_firmware} {imu_port}'.format(
**vars(nanaimo_arguments)
)
assert_success(await nanaimo_cmd.gather(cmd_shell=upload_command))
So everything that is interesting (read: complex) about this test is hidden down in our fictitious “upload_firmware” program. Our earlier assertion that this was difficult to automate seems bogus. Regardless we’ve verified that the device is present and can have a new firmware loaded on it. We’ll come back to this test later to explain why we warned about the complexity. For now let’s move forward to capturing and analysing some IMU data.
IMU Data Test¶
This test will use the following Nanaimo fixtures:
| pytest fixture name | Role |
|---|---|
| nanaimo_serial | Attached to the IMU to capture data. |
| nanaimo_serial_watch | Attached to the IMU validate that it started up normally. |
| nanaimo_yepkit | USB3 hub with controllable power output. |
| nanaimo_gather | Run the serial watcher at the same time we turn on the IMU power |
from nanaimo import assert_success
@pytest.mark.asyncio
async def test_imu(nanaimo_arguments, nanaimo_serial_watch, nanaimo_serial, nanaimo_yepkit, nanaimo_gather):
"""
A test that verifies that our IMU is returning sensible data.
"""
yepkit_port_for_pantilt = nanaimo_arguments.yep_pantilt_port
yepkit_port_for_imu = nanaimo_arguments.yep_imu_port
# Enable the IMU and ensure we see the expected "I'm up" message
coroutines = [
nanaimo_serial_watch.gather(lw_pattern=r"I'm\s+up"),
nanaimo_yepkit.gather(yep_port=yepkit_port_for_imu, yep_command='u')
]
assert_success(await nanaimo_gather.gather(gather_coroutine=coroutines))
# Start the pan-tilt fixture.
assert_success(await nanaimo_yepkit.gather(yep_port=yepkit_port_for_pantilt,
yep_command='u'))
# We're going to wait 3-seconds to let the IMU warm up a bit, to let the
# pan-tilt hardware to work out any resonances from startup impulses, and
# to let any filters flatten out in the IMU.
await nanaimo_gather.countdown_sleep(3)
# We'll capture 10-seconds of data.
artifacts = assert_success(await nanaimo_serial.gather(ser_memory_capture=10))
# Shutdown the pan-tilt fixture and the IMU.
assert_success(await nanaimo_yepkit.gather(yep_port=[yepkit_port_for_pantilt,
yepkit_port_for_imu],
yep_command='d'))
# #####################################################################
# At this point we're done acquiring data. Next use this data to
# evaluate the performance of the IMU
# #####################################################################
# for ypr_tuple in artifacts.data
We’re going to end this example here to avoid digressing into a discussion on analysing sensor data and stay focused on the mechanics of Nanaimo. Before we move on though we offer Figure 5 which is real data captured from the test rig shown in Figure 1. Seeing this data one can see how imprecise the test rig is but also that there are obvious strategies for sanity testing this data-set.
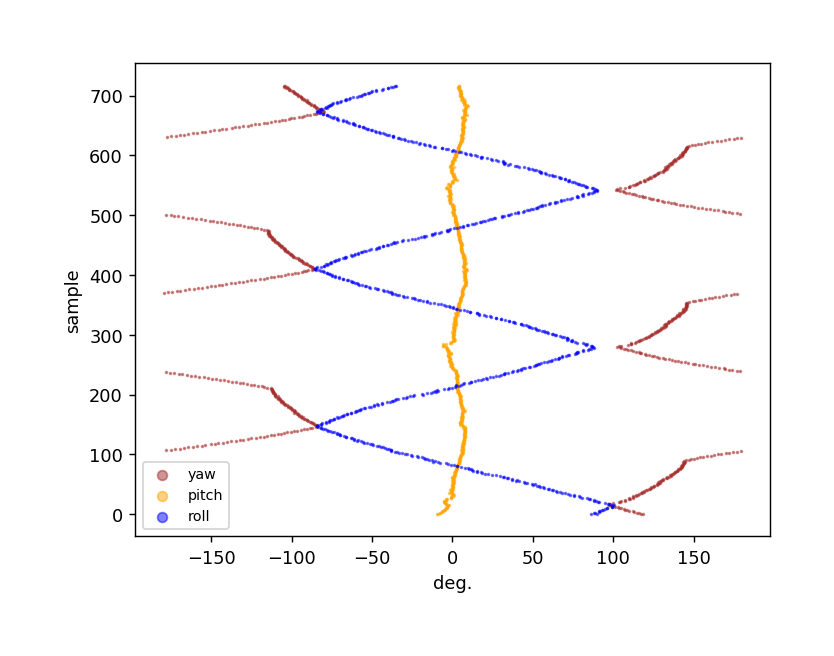
Fig. 5 Plot of Yaw Pitch and Roll data acquired as part of the example test.
Firmware Update Pt.2¶
Let’s revisit the firmware update test again. The complexity we hinted at arises from two things:
- Making sure the firmware is loaded before each test.
- Reducing test time and decreasing part wear by skipping the firmware update if the right firmware was already on the device.
Item 2 is sometimes handled automatically by the underlying tooling (for example, Segger JLink is very good at eliding unnecessary writes) and the amount of time it takes to “upload” or “flash” a firmware to a target device varies significantly depending on the device’s capabilities, the size of the binary, the efficiency of the programmer, and upload protocol in use. Where the test itself must contain logic to avoid unnecessary programming we need to make some decisions. We either need to check and potentially update the firmware before each test or we need to be sure we always run the firmware update test first and successfully.
As Item 2 details, before we can make any decisions on how to ensure we have the correct firmware we need a way to check this. Again, the underlying tool can often handle this for us automatically but for our example we’ll have to ask:
from nanaimo import assert_success
@pytest.mark.asyncio
async def test_upload_firmware_if_needed(nanaimo_arguments, nanaimo_cmd, nanaimo_log):
"""
We'll expand our use of the fictitious 'upload_firmware' binary to suppose it
has a '--query' parameter that returns the version of the firmware found on the
device.
"""
class VersionFilter(logging.Filter):
'''
Very naive filter that finds and stores only the structured version number
found in the subprocess output.
'''
def __init__(self):
self.result = None
def filter(self, record: logging.LogRecord) -> bool:
if record.getMessage().startswith('version='):
self.result = [int(x) for x in record.getMessage()[8:].split('.')]
query_command = 'upload_firmware --query-version {imu_port}'.format(
**vars(nanaimo_arguments)
)
upload_command = 'upload_firmware {imu_firmware} {imu_port}'.format(
**vars(nanaimo_arguments)
)
nanaimo_cmd.stdout_filter = VersionFilter()
assert_success(await nanaimo_cmd.gather(cmd_shell=query_command))
version_triplet = nanaimo_cmd.stdout_filter.result
# We'll be reusing this fixture so let's unset the stdout filter.
nanaimo_cmd.stdout_filter = None
if nanaimo_arguments.imu_firmware_version_major != version_triplet[0] or \
nanaimo_arguments.imu_firmware_version_minor != version_triplet[1] or \
nanaimo_arguments.imu_firmware_version_patch != version_triplet[2]:
nanaimo_log.info('Required firmware version %d.%d.%d - Found %d.%d.%d',
nanaimo_arguments.imu_firmware_version_major,
nanaimo_arguments.imu_firmware_version_minor,
nanaimo_arguments.imu_firmware_version_patch,
version_triplet[0],
version_triplet[1],
version_triplet[2]
)
# Okay, NOW we know we need to upload. So do that.
assert_success(await nanaimo_cmd.gather(cmd_shell=upload_command))
else:
nanaimo_log.info('Required firmware version %d.%d.%d Found. Skipping upload.',
nanaimo_arguments.imu_firmware_version_major,
nanaimo_arguments.imu_firmware_version_minor,
nanaimo_arguments.imu_firmware_version_patch
)
So, there are a few problems with our test_upload_firmware_if_needed method above. First,
it’s a lot of logic that isn’t actually testing anything and there’s no guarantee that this test
will run before any other test that is implicitly testing a specific firmware version. Remembering
the first part of our mantra “Encapsulate complexity in Fixtures” it looks like we need a fixture.
While you can create a fixture as part of a redistributable python package we’re going to keep it
simple and just use the conftest.py [4] file we created next to our test_stuff.py
file. Open that file in your favorite editor and add the following:
Note
Unfortunately, this example won’t actually do anything because your system doesn’t have an “upload_firmware” binary that behaves as our tests assume. You could create a dummy program or you can modify the shell command to use a programmer that you do have available on your system.
#
# conftest.py
#
import logging
import pytest
import typing
import sys
from unittest.mock import MagicMock
import nanaimo
import nanaimo.config
import nanaimo.fixtures
import nanaimo.pytest
import nanaimo.pytest.plugin
from nanaimo.fixtures import FixtureManager
from nanaimo import assert_success
class FirmwareUpdateFixture(nanaimo.builtin.nanaimo_cmd.Fixture):
"""
You'll want to give your fixture a good class docstring since this is used by Nanaimo
as the help text in the --fixtures output (when using the redistributable form of a
fixture, see below)
"""
fixture_name = 'firmware_update'
argument_prefix = 'fwr'
class VersionFilter(logging.Filter):
'''
Very naive filter that finds and stores only the structured version number
found in the subprocess output.
'''
def __init__(self):
self.result = None
def filter(self, record: logging.LogRecord) -> bool:
if record.getMessage().startswith('version='):
self.result = [int(x) for x in record.getMessage()[8:].split('.')]
return True
query_command = 'upload_firmware --query-version {port}'
upload_command = 'upload_firmware {firmware} {port}'
def __init__(self,
manager: 'FixtureManager',
args: typing.Optional[nanaimo.Namespace] = None,
**kwargs: typing.Any):
super().__init__(manager, args, **kwargs)
self._cmd = nanaimo.builtin.nanaimo_cmd.Fixture(manager, args, **kwargs)
@classmethod
def on_visit_test_arguments(cls, arguments: nanaimo.Arguments) -> None:
nanaimo.builtin.nanaimo_cmd.Fixture.on_visit_test_arguments(arguments)
arguments.add_argument('force', action='store_true', help='Always upload firmware.')
arguments.add_argument('firmware_version_major', type=int, help='Required major firmware version.')
arguments.add_argument('firmware_version_minor', type=int, help='Required minor firmware version.')
arguments.add_argument('firmware_version_patch', type=int, help='Required patch firmware version.')
arguments.add_argument('port', help='The serial port to provide to upload_firmware')
arguments.add_argument('firmware', help='The firmware file to upload.')
async def on_gather(self, args: nanaimo.Namespace) -> nanaimo.Artifacts:
if args.fwr_force:
self._logger.info('Forced firmware upload...')
# We are forcing the upload to be sure it works regardless of what exists on the
# target right now.
return await self._do_upload(args)
else:
version_triplet = await self._query_version(args)
if args.fwr_firmware_version_major != version_triplet[0] or \
args.fwr_firmware_version_minor != version_triplet[1] or \
args.fwr_firmware_version_patch != version_triplet[2]:
self._logger.info('Required firmware version %d.%d.%d - Found %d.%d.%d',
args.fwr_firmware_version_major,
args.fwr_firmware_version_minor,
args.fwr_firmware_version_patch,
version_triplet[0],
version_triplet[1],
version_triplet[2]
)
# Okay, NOW we know we need to upload. So do that.
return await self._do_upload(args)
else:
self._logger.info('Required firmware version %d.%d.%d Found. Skipping upload.',
args.fwr_firmware_version_major,
args.fwr_firmware_version_minor,
args.fwr_firmware_version_patch
)
async def _query_version(self, args: nanaimo.Namespace) -> typing.Tuple[float, float, float]:
self._cmd.stdout_filter = self.VersionFilter()
try:
query = self.query_command.format(port=args.fwr_port)
await self._cmd.gather(cmd_shell=query)
return self._cmd.stdout_filter.result
finally:
self._cmd.stdout_filter = None
async def _do_upload(self, args: nanaimo.Namespace) -> nanaimo.Artifacts:
upload = self.upload_command.format(firmware=args.fwr_firmware,
port=args.fwr_port)
return await self._cmd.gather(cmd_shell=upload)
@pytest.fixture
def firmware_update(nanaimo_fixture_manager, nanaimo_arguments) -> nanaimo.fixtures.Fixture:
return FirmwareUpdateFixture(nanaimo_fixture_manager, nanaimo_arguments)
Now go back to your test file and change the test_upload_firmware_if_needed method to:
from nanaimo import assert_success
@pytest.mark.asyncio
async def test_upload_firmware(firmware_update):
assert_success(await firmware_update.gather(fwr_force=True))
Note
Note that the pytest fixture name should be the canonical name or fixture_name
you defined for your fixture. When using setup.cfg to register redistributable plugins
this is done automatically. It’s good form to follow this convention when defining the
plugin “manually” in a conftest.py. See the documentation for nanaimo.pytest.plugin
for more details on creating and registering your own Fixture
types.
This is now a test that always runs to verify that the firmware update works. For all other tests we can reuse this fixture to ensure we are testing with the current firmware. For example:
@pytest.mark.asyncio
async def test_imu(firmware_update,
nanaimo_arguments,
nanaimo_serial_watch,
nanaimo_serial,
nanaimo_yepkit,
nanaimo_gather):
"""
A test that verifies that our IMU is returning sensible data.
"""
assert_success(await firmware_update.gather())
yepkit_port_for_pantilt = nanaimo_arguments.yep_pantilt_port
yepkit_port_for_imu = nanaimo_arguments.yep_imu_port
...
Configuration¶
Finally, let’s look at how the configuration works. In our example so far we’ve assumed several
properties were available in the fixture arguments. There are several ways to provide these values.
For a Linux-like system that is dedicated as a test host you may want to create an
/etc/nanaimo.cfg file. For user overrides you can provide ~/nanaimo.cfg. For your
test you can supply these arguments either in setup.cfg or in tox.ini. For example:
# In tox.ini
[nanaimo]
fwr_firmware_version_major = 2
fwr_firmware_version_minor = 1
fwr_firmware_version_patch = 0
fwr_port = /dev/serial/by-id/usb-some-uart-port0
fwr_firmware = myfirmware.bin
A few things to note about Nanaimo ini syntax; first it uses configparser.ConfigParser to parse
the configuration files and it also uses configparser.ExtendedInterpolation to allow referencing
other nanaimo ini sections. Finally, underscores are treated as namespaces so the following tox configuration
is equivalent to the previous example:
# In tox.ini
[nanaimo:fwr]
port = /dev/serial/by-id/usb-some-uart-port0
firmware = myfirmware.bin
[nanaimo:fwr_firmware_version]
major = 2
minor = 1
patch = 0
Also note in our previous fixture example that the prefix fwr was omitted from the argument names:
@classmethod
def on_visit_test_arguments(cls, arguments: nanaimo.Arguments) -> None:
nanaimo.builtin.nanaimo_cmd.Fixture.on_visit_test_arguments(arguments)
arguments.add_argument('force', action='store_true', help='Always upload firmware.')
arguments.add_argument('firmware_version_major', type=int, help='Required major firmware version.')
arguments.add_argument('firmware_version_minor', type=int, help='Required minor firmware version.')
arguments.add_argument('firmware_version_patch', type=int, help='Required patch firmware version.')
arguments.add_argument('port', help='The serial port to provide to upload_firmware')
arguments.add_argument('firmware', help='The firmware file to upload.')
This is done on purpose. Nanaimo will prepend the prefix based on the value of argument_prefix
for a given fixture. What’s useful about this is it allows fixtures to be composed out of other fixtures.
For example, if you compose MyOtherUpdateFixture fixture out of FirmwareUpdateFixture like this:
class MyOtherUpdateFixture(FirmwareUpdateFixture):
...
argument_prefix = 'mou'
...
@classmethod
def on_visit_test_arguments(cls, arguments: nanaimo.Arguments) -> None:
super().on_visit_test_arguments(arguments)
…then your new fixture’s arguments will be prefixed with mou and won’t conflict with fwr arguments.
If you aggregate in a fixture instead (like FirmwareUpdateFixture does with nanaimo_cmd.Fixture
then the arguments will get their prefix from the aggregate.
Redistributable¶
Let’s say we like our firmware update fixture so much we want to package it up and make it available to other pytests using our package. To do this we’d change four things from our previous example:
1. We need to add a setup.py and setup.cfg to allow setuptools to package up our python project for redistribution
+ myproject
|
| + src
| |
| + test
| | test_stuff.py
| | conftest.py
|
| tox.ini
| setup.py
| setup.cfg
Feel free to use the nanaimo github repository as an example if you like.
2. Move our FirmwareUpdateFixture to its own module. Let’s say we created a my_module.py
file and moved our fixture out of conftest.py to this file
+ myproject
|
| + src
| | my_module.py
| |
| + test
| | test_stuff.py
| | conftest.py
|
| tox.ini
| setup.py
| setup.cfg
In
my_module.pychange these lines# This is a quick-and-dirty way to create our module that works for conftest.py # without any special configuration. @pytest.fixture def firmware_update(nanaimo_fixture_manager, nanaimo_arguments) -> nanaimo.fixtures.Fixture: return FirmwareUpdateFixture(nanaimo_fixture_manager, nanaimo_arguments)
to this
# This extends the core Nanaimo pytest plugin with our own but we need to tell # Nanaimo about it in our setup.cfg. def pytest_nanaimo_fixture_type() -> typing.Type['nanaimo.fixtures.Fixture']: return FirmwareUpdateFixture
Finally list our new module in the pytest11 section of your setup.cfg
[options.entry_points] pytest11 = pytest_nanaimo = nanaimo.pytest.plugin pytest_nanaimo_plugin_firmware_update = my_module
Now your fixture is available in the same way it was before to tests but will also be available to
any packages that depend on your package and the fixture will be available to nait (NanAimo Interactive Terminal). Furthermore,
pytest --help will now show your fixture arguments and pytest --fixtures will include the
docstring for your fixture class. Finally, you can now distribute your fixture to your tests using
pypi or a similar distribution service.
nait (NanAimo Interactive Terminal)¶
Nanaimo comes with a CLI designed to allow direct interaction with one or more fixtures installed in
your environment. This allows you to interactively test configuration or reset the state of a failed
fixture. These fixtures will only be available to nait if they are specified in your setup.cfg (as we
discussed in the previous section and as detailed in
Nanaimo's pytest plugin documentation). Using this guide’s firmware update
fixture example one might use nait to manually update a firmware like this
nait firmware_update --fwr-firmware path/to/my/firmware.bin
Nait will reuse all our configuration and will provide the exact same environment to the fixture as pytest
since it’s actually just a thin wrapper around pytest.main().
See the nait reference section of this documentation for more detail.
| [1] | Wikipedia Article, “Test Fixture”: https://en.wikipedia.org/wiki/Test_fixture |
| [2] | The JUnit 4 wiki |
| [3] | Wikipedia Article, “xUnit”: https://en.wikipedia.org/wiki/XUnit |
| [4] | Conftest.py in pytest docs: https://docs.pytest.org/en/latest/fixture.html#conftest-py |